

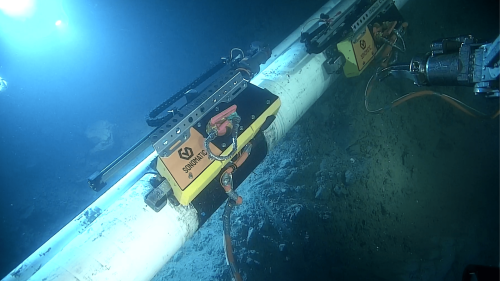
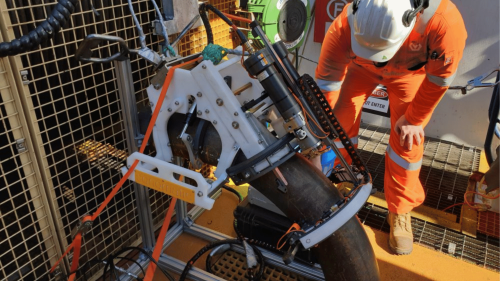


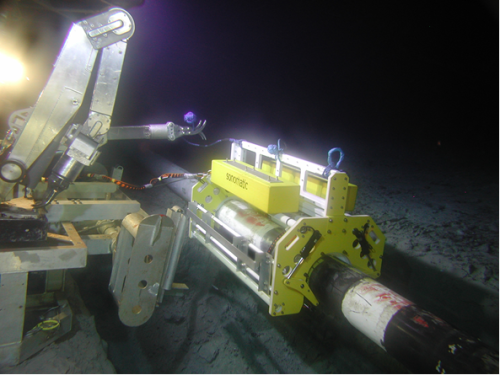




The Mini-ROVIT tool was developed to provide cost-effective wall thickness scanning for subsea flowlines. Designed for deployment via small ROVs, it enables corrosion mapping of field joints without requiring large work-class ROVs or dedicated DSVs, significantly reducing costs.
Key features include integrated ROV design, circumferential cleaning, and high-precision scanning for pipelines ranging from 6 to 20 inches. Its compact size allows rapid mobilisation from vessels of opportunity, minimising operational expenses. This innovation has led to cost savings of up to 70% while enhancing the efficiency of subsea pipeline integrity assessments.